点云补全研究综述
随着激光雷达、激光或RGB-D扫描仪等三维扫描设备的普及,点云数据的获取变得更加容易, 已在机器人、自动驾驶、三维建模和制造等领域产生了大量的研究。 然而,由于遮挡、反射、透明度以及设备分辨率和角度的限制,这些设备直接收集的原始点云数据是不均匀的、局部的。 因此,从局部的点云数据中生成完整的点云对于促进下游应用的发展至关重要。 点云补全技术在各种计算机视觉应用中有着独特而关键的作用。
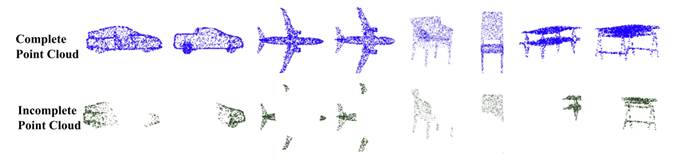
图1 点云补全示例
3d重建:生成完整的3D场景是许多计算机视觉任务的基础和重要技术,包括自动驾驶中的高分辨率3D地图重建、
机器人应用中的3D重建和地下采矿。例如,应用在机器人领域的点云补全可以通过构建3D场景来帮助进行路线规划和决策。
除此之外,在地下开采空间进行大规模三维环境重建,有利于准确监测开采安全。
三维检测:3D目标检测依赖于完整的点云来保持优异的性能。例如,激光雷达捕捉到的远处的汽车往往是稀疏的, 通常很难被检测到。我们通常需要对目标点云进行完全分割才能完成检测。例如,在对 KITTI 数据集进行三维检测时, 需要对车辆点云进行分割并对其车辆朝向和规模做归一化处理,然后才能获得完整的车辆点云。
3d形状分类:对于三维形状分类,最终需要从部分观测恢复完整的点云。局部点云代表物体的一小部分,通常难以识别。
以上,由于点云补全在许多实际的计算机视觉应用中起着至关重要的作用,因此迫切需要对点云补全技术进行广泛的研究。 然而,关于点云补全及其下游任务的调查研究很少,而深度学习在点云补全方面的最新进展迫切需要总结。 在过去的几年里,研究人员尝试了许多方法来完成深度学习中的点云补全技术。 早期对点云补全的尝试试图通过体素化和三维卷积将成熟的方法从2D补全任务转移到3D点云。 然而,随着空间分辨率的提高,这些方法的计算成本较高。随着PointNet和PointNet++的巨大成功, 直接处理三维坐标已经成为三维点云分析的主流方法。该技术在许多开创性的点云补全工作中得到了进一步应用, 其中一个编码器-解码器方案被设计出来生成完整点云。近年来,基于点的补全方法、基于视图的补全方法、基于卷积的补全方法、 基于图的补全方法、基于生成模型的补全方法、基于transformer的补全方法等也如雨后春笋一样涌现出来,并取得了显著的成果。